In dieser Anleitung wird beschrieben, welche Funktionen das Diagnoseprogramm bietet.
Im folgenden erfahren Sie wie man sich am Diagnoseprogramm einloggen kann.
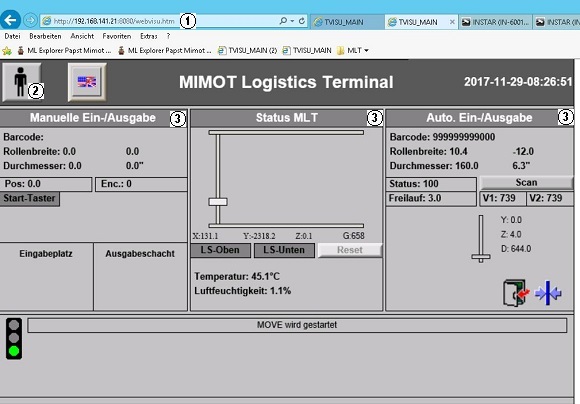
1 - Hier sehen Sie die Adresszeile des Browsers. Bitte tragen Sie hier die IP Adresse der SPS Steuerung ein. Diese IP Adresse ist im MBO hinterlegt oder Ihr Netzwerkadministrator kann Sie Ihnen nennen. Zusätzlich setzen Sie den ":8080/webvisu.htm" - so gelangen Sie zur Roboter Oberfläche.
2 - Hier sehen Sie den Anmeldeknopf. Diesen müssen Sie betätigen um sich anzumelden.
3 - In diese Darstellungen sehen Sie diverse Statusanzeigen des Roboters
Der Anmeldevorgang
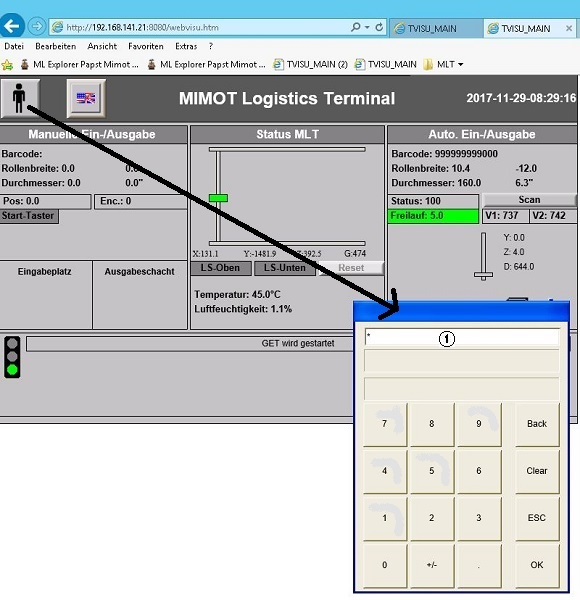
1 - Nachdem Sie den Anmeldeknopf gedrückt haben, können Sie das Passwort eingeben. Dieses sehen Sie in Ihrem MBO oder bekommen Sie bei Ihrem Administrator.
Der Anmeldevorgang abschließen
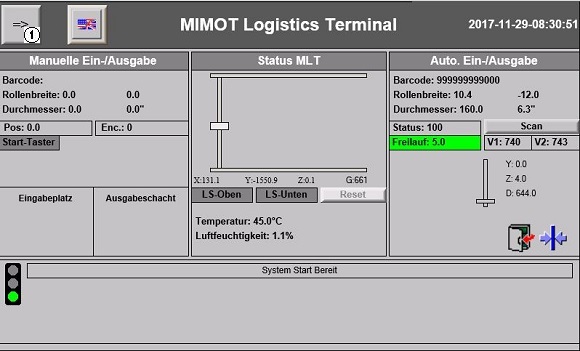
1 - Nachdem Sie das richtige Password eingetragen haben, sind Sie nur noch ein Klick vom Diagnoseprogramm entfernt - bitte diese Taste klicken
Der Einstieg zum Diagnoseprogramm

1 - Nun sehen die den Menüpunkt Diagnose - bitte drücken
hochHier sehen Sie den Aufbau des Diagnoseprogramms.Die MIMOT-Maschinen sind in logisch zusammengehörende Baugruppen unterteilet. Diese Baugruppen haben wiederum Unterbaugruppen, also davon abgeleitete Baugruppen. Meldet die unterste Baugruppenebene einen Status, wird dieser Status von Ebene zu Ebene durchgereicht. Dabei sind die Aufbauten der einzelnen Baugruppen sehr ähnlich. Dies hat zur Folge, --> Kann man eine Achse bewegen, kann man alle Achsen bewegen. Im folgenden haben wir zwei beliebige Achsen ausgewählt. Sie können dieses Wissen auf alle anderen Achsen ableiten.
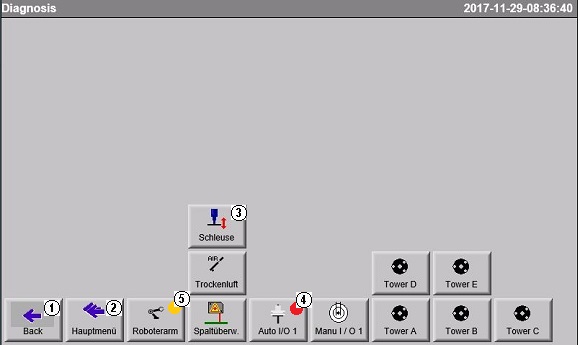
1 - Eine Ebene in der Menüstruktur zurückspringen.
2 - Springen zurück in das Hauptmenü
3 - Die oberste Baugruppe in diesem Fall "Schleuse" ebenso wie Tower, Auto i/O, Roboterarm usw..
4 - Am roten Punkt erkennt man, dass eine Baugruppe oder Unterbaugruppe einen Status meldet, z.B. nicht Referenz ist oder Fehler meldet. Durch das Anklicken sehen Sie welche Unterbaugruppe gemeint ist. Dieser Punkt verschwindet, falls mit der Baugruppe alles ok ist und erscheint sobald ein Fehler vorliegt.
5 - Am gelben Punkt erkennt man, dass die Baugruppe oder eine Unterbaugruppe aktiv in Bewegung ist. Diese Punkt verschwindet, falls eine Baugruppe steht und erscheint sobald sich eine Baugruppe wieder bewegt.
hochHier sehen Sie die Unterbaugruppen von dem Roboterarm
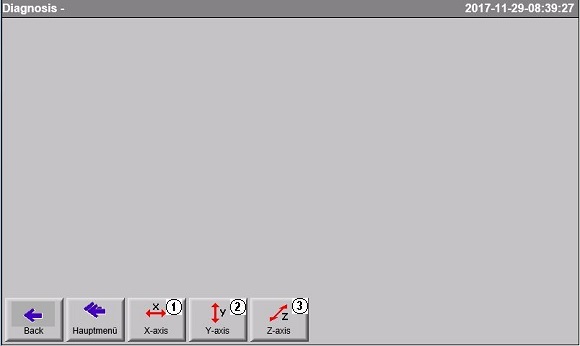
1 - Der Roboterarm hat eine X-Achse.
2 - Der Roboterarm hat eine Y-Achse
3 - Der Roboterarm hat eine Z-Achse.
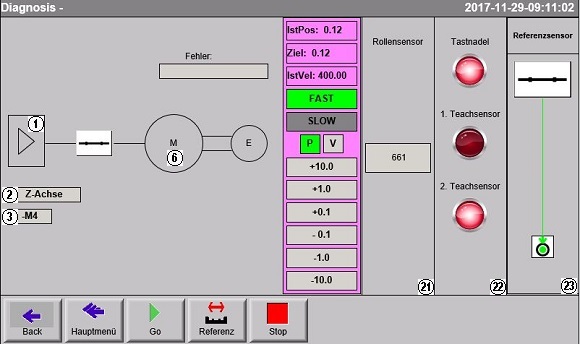
Nach dem Klick auf eine Unterbaugruppe ihrer Wahl sehen sie z.B.: die Z-Achse von dem Roboterarm, die unterste Baugruppe mit ihren zugeordneten Elementen

1 - Hier wir die Motorsteuerung symbolisch dargestellt, klicken sie darauf öffnet sich ein weiteres Fenster - siehe weiter unten.
2 - Hier sehen sie die Bezeichnung des Motors in Klarschrift
3 - Hier sehen sie die Motornummer, diese ist identisch mit der Bezeichnung im Elektroschaltplan und mit der Beschriftung auf dem Motor selbst. Beim Klick auf das Symbol öffnet sich der Elektroschaltplan oder die mechanische Zeichnung. (in Arbeit)
4 - Meldet der Motor oder diese Baugruppe einen Fehler wird dieser hier angezeigt, MIMOT bezeichnet dies als Fehlerlevel 1, dieser Fehler kann direkt einer Hardwarekomponente zugewiesen werden. Diese Meldung wird dann durchgereicht bis hoch zum LVS und dort auch zur Anzeige gebracht..
5 - Hier wird die Motorfreigabe symbolisch dargestellt, beim Drücken der NotAus oder beim Klick auf diese Symbol wird die Freigabe geöffnet, der Motor ist spannungsfrei und kann bewegt werden, dieses dient dem Test und Sicherheitszwecken.
6 - Hier ist der Motorsymbolisch dargestellt, beim Klick auf das Symbol öffnet sicher der Schaltplan oder ein Live Bild vom Motor in eingebauter Lage
7 - wird aktuell nicht verwendet, zeigt in Zukunft die Motor Eigenschaften an z.B.: "Stepper, DC,AC Motor, Servo" man wird dann Informationen über die Auslastung bekommen, also wie häufig hat der Motor einen Fehler produziert, wie lange ist er im Einsatz usw. präventive Wartungswechsel können hiervon abgeleitet werden.
8 - Hier sehen Sie die Ist Position der Achse, sie können den Wert nicht editieren, verändern Sie jedoch die Position der Achse ändert sich auch der Istwert.
9 - Hier sehen Sie die Soll Position der Achse. Dieser Wert wird von der Software berechnet oder kann von Ihnen vorgegeben werden.
10 - Hier sehen Sie die aktuell vorgegebene Geschwindigkeit.
11 - Hier können Sie zwischen den zwei vorgegeben Geschwindigkeiten auswählen FAST- siehe weiter unten.
12 - Hier können Sie zwischen den zwei vorgegeben Geschwindigkeiten auswählen SLOW. - siehe weiter unten.
13 - Positionier Modus: die Achse wird auf eine Position geschickt (siehe dazu auch Punkt 14).
14 - Geschwindigkeitsmodus: der Motor dreht mit einer Geschwindigkeit x und reagiert auf in Abhängigkeit der Sensoren
15 - 10 Schritte vor.
16 - 1 Schritte vor.
17 - 0.1 Schritte vor
18 - 0.1 Schritte zurück.
19 - 1 Schritte zurück.
20 - 10 Schritte zurück
21 - Hier sehen sie einen analogen Sensor und seinen aktuellen Wert, der dieser Baugruppe zugeordnet ist. Beim Klick auf das Symbol öffnet sich der Elektroschaltplan. (in Arbeit)
22 - Hier sehen sie einen digitale Sensor und ihren aktuellen Status, die dieser Baugruppe zugeordnet sind. Beim Klick auf das Symbol öffnet sich der Elektroschaltplan. (in Arbeit)
23 - Hier sehen sie einen Referenzsensor dieser ist direkt der aktuellen Baugruppe zugeordnet und ist verantwortlich für die Nulllage der Achse , also dem Referenzlauf.
24 - dieser Button arbeitet wie die Buttons vom Index 15- 20.
25 - dieser Button starten den Referenzlauf dieser Baugruppe, hierbei wird der Status jedes einzelnen Sensors überprüft.
26 - dieser Button stoppt den aktuellen Ablauf.
Hier sehen Sie die zusätzlichen Parameter, die einem Motor zugeordnet werden können, sie erreichen das Fenster beim Klick auf das Verstärkersymbol
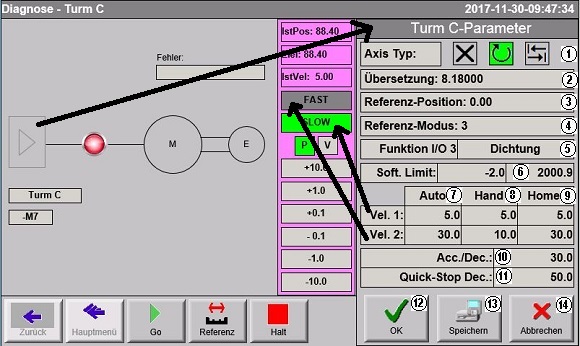
1 - Angabe des Achsenmodus: Dauerlauf, Rotation, Strecke.
1.1 Nicht vorhanden
1.2 Drehachse: Turm, Drehteller;..
1.3 Linear Achse: X-Achse, Y-Achse, Z-Achse, Transband/handling;..
2 - Getriebeübersetzungsverhältnis
Die Übersetzung ist abhängig vom Getriebe der Achse (Ritzel,..).
3 - Wert auf der Referenzposition
4 - Referenzlauf-Modus: Zeigt in welcher
Abhängigkeit von Sensoren, die Achse genullt wird.
Dabei ist die Standardeinstellung auf
Referenz-Modus: 3.
5 - Konfigurierbarer I/O mit der jeweiligen
Funktionsbeschriftung
Man kann vier verschiedene Modi auswählen:
Eingang, Bremse, Schwenkarm und Dichtung.
6 - Hier stehen die Softwarelimits, die der Achse zugeordnet
sind: positives , sowie negatives Limit
Limits der Achse (min/max) in beide Laufrichtungen.
7 - AUTO = Im Automatischen Modus. Das ist die Geschwindigkeit der Achse , die im Automatikmodus
verwendet wird, also von der Software gesteuert.
Vel.1: langsame Geschwindigkeit für das Teachen (Roboter der X, Y und Z-Achsen)
Vel.2: schnelle Geschwindigkeit für alle Achsen
8 - HAND = Im manuellen Betrieb (Diagnose). Das ist
die Geschwindigkeit der Achse , die im Handmodus verwendet wird, wenn Sie
die Achse im Diagnoseprogramm steuern
V1:langsame Geschwindigkeit das Teachen (Roboter der X, Y und Z-Achsen)
V2:schnelle und normale Geschwindigkeit für
alle Achsen.
9 - HOME = Bei Referenzlauf. Das ist die Geschwindigkeit der Achse , die während des Referenzlaufes
verwendet wird.
V1: langsame Geschwindigkeit das Teachen (Roboter der X,
Y und Z-Achsen)
V2: schnelle und normale Geschwindigkeit für alle Achsen.
10 - Hier sehen sie den Wert für die Achsenbeschleunigung ,
dieser Wert gilt auch für das Bremsen
Acc./Dec. = Beschleunigung in alle Betriebsarten.
11 - Hier steht der Wert für den softwareseitigen
Sofortstopp
Quick-Stop Dec. = Beschleunigung im Fall eines Notstopps.
12 - Übernahme der eigetragenen Daten
OK = Einträge werden validiert oder die Seite wird verlassen ohne die Änderung zu speichern. (Möchten Sie die Seite mit Ihren gewünschten Einstellung
verlassen, dann müssen Sie als erstes auf "Speichern" drücken und
anschließen auf die "OK" Taste.
13 - Die Daten werden im Motor gespeichert
SPEICHERN = Es wird Ihre gewünschte Einstellung und die angezeigten Werte gespeichert.
14 - Verwerfen der eingestellten Daten
ABBRECHEN = Es wird die Seite verlassen ohne die Änderung/Einstellung zu speichern
.
ACHTUNG!!! Beim Verlassen der Seite mit dem OK Button, bei Stromausfall oder bei einer Abschaltung der Steuerung, ohne vorher gespeichert zu haben,gehen die Änderungen/Einstellungen verloren!
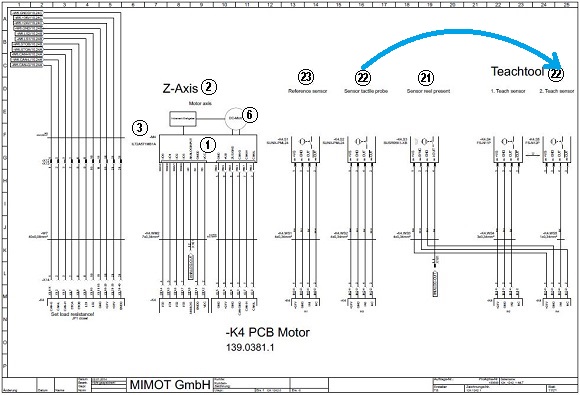
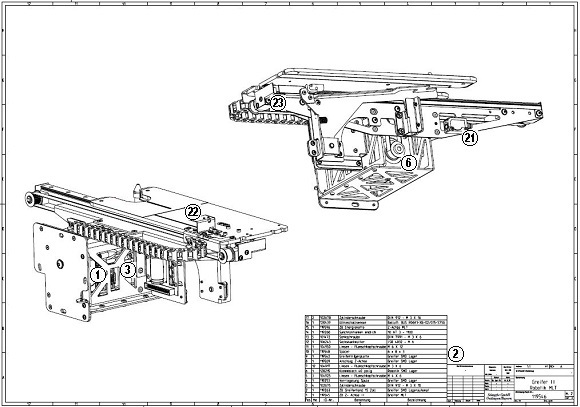
hochHier sehen Sie wie der Elektroplan und die mechanischen Zeichnungen mit dem Diagnoseprogramm verbunden sind, Hierbei bedeutet die gleiche Nummer die gleiche Komponente in unterschiedlicher Darstellung, dieses Prinzip zieht sich durch die komplette Anlage.